Section: New Results
Modeling and identification of the sensory-motor system
Inertial Sensor based Analysis of Gait for Post-stroke individuals
Participants : Christine Azevedo Coste, Benoît Sijobert, Jérôme Froger [CHU Nîmes] , François Feuvrier [CHU Nîmes] .
Walking impairment after stroke can be addressed through the use of drop foot stimulators (DFS). In these systems, electrical stimulation is applied to activate the common peroneal nerve and elicit ankle dorsiflexion during the swing phase of gait. DFS are generally piloted by a heel switch positioned in the shoe of the affected side with stimulation being triggered ON by heel rise of the affected foot and triggered OFF by heel strike.
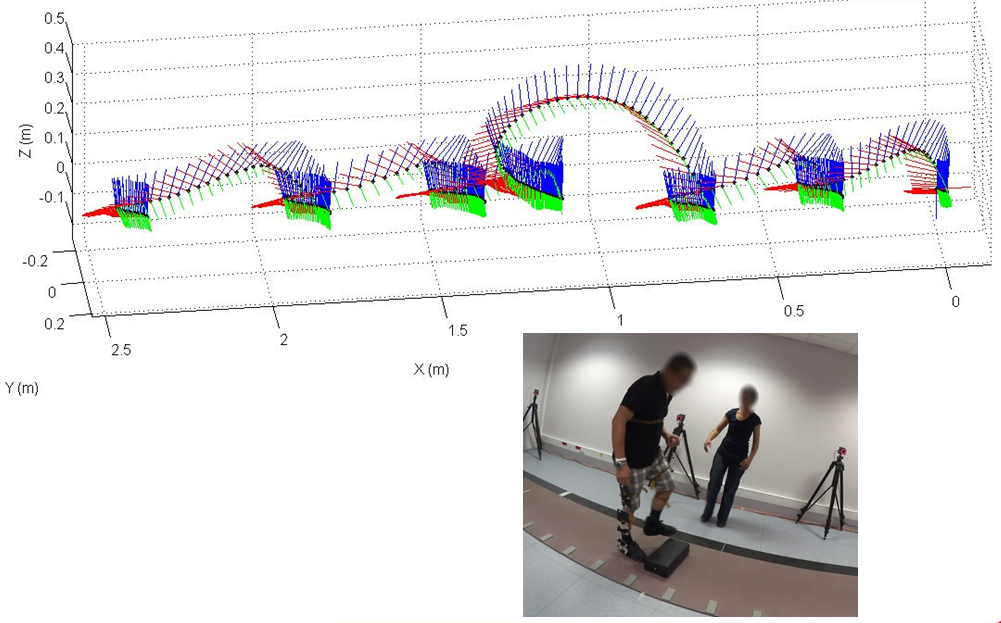
Using inertial sensors for modulating FES intensity could provide a more optimized delivery of stimulation and could also enable to regulate dorsiflexion in the presence of disturbances, such as fatigue or stairs. It could also increase the number of potential users of the technology, allowing subjects walking without heel strikes to be stimulated at a correct timing. Meanwhile, pathological post-stroke gait requires the investigation of complex inertial sensors based algorithms for being able to compute different useful gait parameters for later triggering stimulation. Numerous constraints related to these clinical context, pathology and usability have to be taken into account for providing a reliable patient oriented solution. In this work, we aim to compare accuracy and feasibility of using a minimum amount of inertial sensors instead of the gold standard camera based motion capture, for assessing joint angles and gait events such as stride length or dorsiflexion speed at heel on. 29 subjects were included in this experimental protocol. Equipped with motion capture targets on which an inertial sensor is set, subjects had to perform an experimental path on a gait carpet. EMG recordings were also performed to monitor and evaluate fatigue. Algorithms were developped for computing 3D trajectory (6), dorsiflexion angles at mid-swing or before heel strike. Results shows an RMS error of 5.8° at heel on and 6.6° at mid-swing compared to motion capture data [20]. François Feuvrier has defended his medicine thesis on this topic on December 14th 2017.